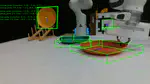
I used three foundation models – SAM, Grounded DINO, and FoundationPose – to obtain 6D pose estimates on raw RGBD robot demonstrations. In order to improve results, I added L1-consistent bounding boxes and various annotations to the data. Ultimately, the results were mixed, and we’re still looking for improvements.