Sim2real Image Translation Enables ViewpointRobust Policies from Fixed-Camera Datasets
 Overview
OverviewAbstract
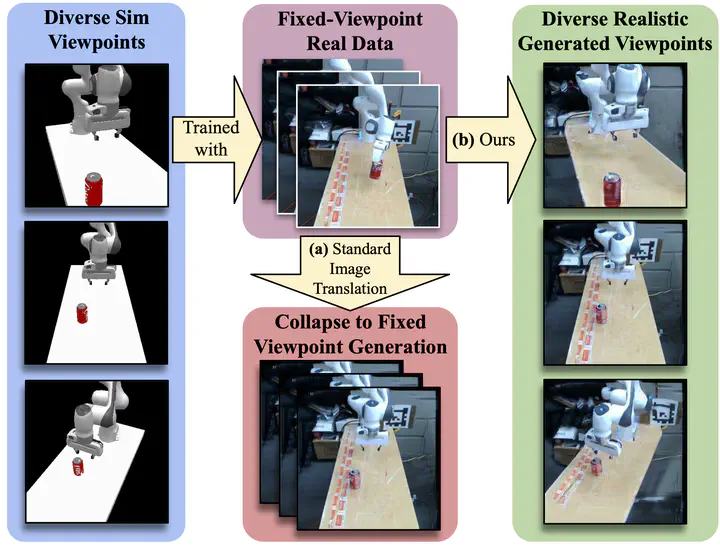
Vision-based policies for robot manipulation have achieved significant recent success, but are still brittle to distribution shifts such as camera viewpoint variations. One reason is that robot demonstration data used to train such policies often lacks appropriate variation in camera viewpoints. Simulation offers a way to collect robot demonstrations at scale with comprehensive coverage of different viewpoints, but presents a visual sim2real challenge. To bridge this gap, we propose an unpaired image translation method with a novel segmentation-conditioned InfoNCE loss, a highly-regularized discriminator design, and a modified PatchNCE loss. We find that these elements are crucial for maintaining viewpoint consistency during translation. For image translator training, we use only real-world robot play data from a single fixed camera but show that our method can generate diverse unseen viewpoints. We observe up to a 46% absolute improvement in manipulation success rates under viewpoint shift when we augment real data with our sim2real translated data.