Jeremiah Coholich
Jeremiah Coholich
Home
Publications
Awards
Blog
Light
Dark
Automatic
published
SeeTraceAct: Visibility-Aware Latent Planning from Cross-Embodiment Demonstration Videos
Under review
Jaehyeon Son
,
Junhyun Kim
,
Kyle Kam
,
Jeremiah Coholich
,
Seok Joon Kim
,
Jinhoo Kim
,
Chris Dongjoo Kim
,
Jaemin Cho
,
Dieter Fox
,
Zsolt Kira
Cite
arXiv
EVE: A Generator-Verifier System for Generative Policies
Under review
Yusuf Ali
,
Gryphon Patlin
,
Karthik Kothuri
,
Jeremiah Coholich
,
Muhammad Zubair Irshad
,
Wuwei Liang
,
Zsolt Kira
Cite
arXiv
Sim2real Image Translation Enables ViewpointRobust Policies from Fixed-Camera Datasets
2026 International Conference on Robotics and Automation (ICRA)
Jeremiah Coholich
,
Justin Wit
,
Robert Azarcon
,
Zsolt Kira
Cite
Project Page
Code
Dataset
arXiv
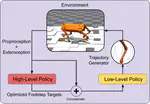
Hierarchical Reinforcement Learning and Value Optimization for Challenging Quadruped Locomotion
2025 American Control Conference (ACC)
Jeremiah Coholich
,
Muhammad Ali Murtaza
,
Seth Hutchinson
,
Zsolt Kira
PDF
Cite
Code
Video
arXiv
Soft Foot Sensor Design and Terrain Classification for Dynamic Legged Locomotion
2020 3rd IEEE International Conference on Soft Robotics (RoboSoft)
Xiaofeng Guo
,
Bryan Blaise
,
Jennifer Molnar
,
Jeremiah Coholich
,
Shantanu Padte
,
Ye Zhao
,
Frank L. Hammond III
PDF
Cite
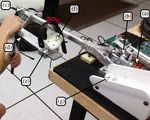
Compliance Shaping for Control of Strength Amplification Exoskeletons with Elastic Cuffs
2019 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM)
Gray Cortright Thomas
,
Jeremiah Coholich
,
Luis Sentis
PDF
Cite
arXiv
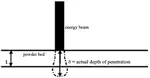
Evaluation of energy density measures and validation for powder bed fusion of polyamide
CIRP Annals Manufacturing Technology Vol. 1, 66, 2017
David Bourell
,
Jeremiah Coholich
,
Antione Chalancon
,
Abhimanyu Bhat
PDF
Cite
Cite
×